



Finding Your Path to Success with AGVs
Guest blog by David Béguin from MHI Member Company BlueBotics
Autonomous navigation technology enables an automated vehicle to know where it is, navigate autonomously around its environment, and perform pre-defined actions (such as raising a lift truck’s forks). Whether this technology is inside an automated guided vehicle (AGV), an automated mobile robot (AMR) or an automated forklift (AGF), the principal is the same – but there are numerous types of navigation systems driving today’s automated vehicles. So, when assessing your vehicle choices, which type of navigation system should you focus in on? Which technology will be the best fit for your particular application?
There are fundamentally five different autonomous navigation methodologies: line following, tag following, laser triangulation, vision guidance, and natural feature (although, as we will explain, there are variations in natural feature navigation systems, which matter a lot). To compare the differences between these technologies, it pays to examine them in relation to the factors that are most likely to impact the success of any AGV operation:
- • cost of adapting on-site infrastructure
- • Vehicle installation time
- • Vehicle accuracy
- • Vehicle reliability
- • Vehicle’s robustness to changes in the environment
- • Vehicle speed
- • Cost of maintaining the vehicle
- • Cost of modifying your AGV project (routes etc.)
- • The degree of fleet management possible
Line following
Line following is the first generation of autonomous navigation and the simplest of all the methodologies. An AGV simply follows a pre-defined line on the ground, which could be magnetic tape, inductive wire or just a painted line. A sensor on the vehicle looks down and measures its deviation left or right from the line and then uses this information to correct its trajectory. Line following will move a vehicle very precisely from A to B and is ideal for fixed applications such as moving parts from one station to another in areas such as automation manufacture.
Although accurate and reliable, line following has a high initial infrastructure investment cost and takes a long time to install. It is robust to changes in the environment, but cost of maintenance of the lines and cost of any modification required are high. If more than one vehicle is required within an area, fleet management is also complicated.

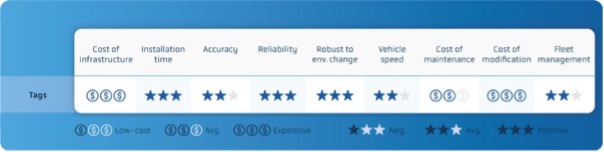
Tag following
Like line following, tag navigation requires QR codes, RFID tags or magnetic points to be installed in the floor for the AGV to follow. It is probably the reference methodology for e-commerce, where simple path layouts are the norm. Again, like line following, accuracy and reliability are reasonably high, but the cost and time of installation is high and modification difficult.
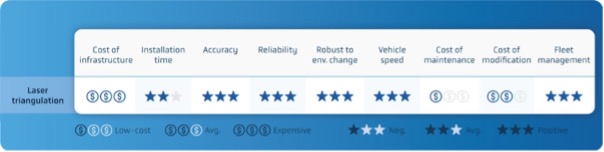
Laser triangulation
Also known as laser guided navigation (LGN), laser triangulation uses three references to triangulate the position of the AGV. Lasers on top of the vehicle bounce off reflectors installed around the environment. Unlike line and tag following, this technology requires dedicated software tools to program routes on a virtual path. Lasers need to be high on the vehicle to avoid obstacles and the initial installation of the reflectors and survey to create the virtual map can take several days. Cost of maintenance and modification, however, is relatively low and the technology is a good choice if fleet management is required.
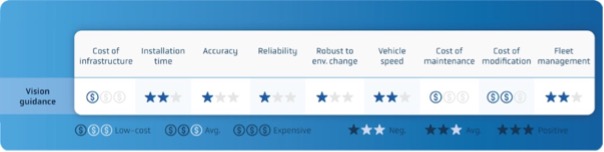
Vision guidance
For vision guidance, a camera installed on the AGV is used to recognize features and, by comparing extracted features to a 3D map, the vehicle can calculate its position. Installation is quick and simple with no changes to infrastructure required. The user initially drags the vehicle along the route to teach the path and construct the 3D map from continuously collected images. Although this has big advantages in terms of installation time and cost, the system is sensitive to changes in light or environment, limiting its accuracy, reliability and speed.
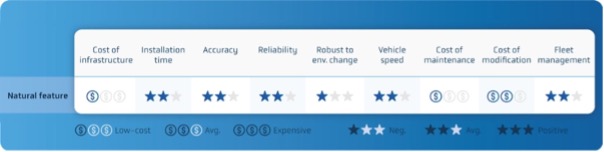
Natural feature (using SLAM navigation)
Often based on the open-source Robotic Operating System (ROS), natural feature is the newest navigation option. The AGV uses 2D scanners to compare its surroundings with a previously created grid map to determine its location. The system is simple to install with only a few reflective stickers possibly required. Like laser triangulation, this navigation method requires a dedicated software tool to program system logic during installation. However, for most suppliers this technology is relatively new and advanced tools are not yet available, which can mean a long installation time. The system also needs to recognize around 60% of its environment to calculate positions and so can be overly sensitive to changes in the environment, which can impact overall reliability, vehicle speed and accuracy. To reduce this impact, may vendors install additional scanners high on the vehicle, but this increases cost and restricts the possibility of using low profile vehicles. Using a virtual path, however, means cost of modification is low and fleet management good if environment remains stable.
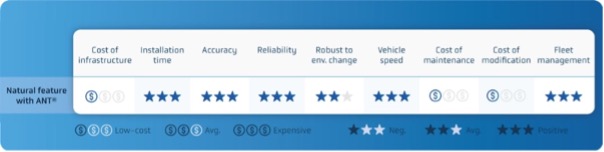
Natural Feature (using ANT®)
ANT® technology is different to other natural feature navigation solutions because it uses a feature-based rather than grid-based map. This means it compares features with features, rather than laser points with laser points, substantially increasing the accuracy, reliability and robustness to environmental change of the system, bringing it in line with laser triangulation. Unlike laser triangulation, however, an ANT® navigation solution is simple and quick to install with no changes to permanent infrastructure required. Its use of fixed features in the environment means it offers great reliability and accuracy to +/- 1cm, while providing a solution that is easy to handle, low maintenance and very cost-effective to modify.
Unlike most natural feature offerings, ANT® technology is a mature, well-proven solution with more than 2,500+ ANT® driven vehicles in operation, having traveled over 10M km across more than 1,000 global installations. Using the ANT® server platform, ANT® driven vehicles can be combined in a scalable fleet, no matter what AGV make or model, making ANT® a flexible, future-proof solution capable of meeting a business’ evolving needs.
Conclusion
The choice of navigation technology will have a significant impact on costs and performance of an AGV and will either constrain or facilitate future system modifications, so it is worth spending the time understanding the options available and speaking with navigation technology experts. Whether developing or installing an AGV, having the right solution for your application may well end up saving you a lot of time, cost and pain.
If you are thinking about developing or installing an AGV…
Join BlueBotics at this year’s ProMatDX event, where you can speak to autonomous navigation experts, enjoy an educational seminar about different navigation technologies, and experience a full demonstration of ANT® technology, including a full fleet demo.
Registered visitors can access the BlueBotics’ PromMatDX showcase at https://www.dx.promatshow.com/sponsors/11EB706027658CB08273E975B1667518/BlueBotics-SA to discuss their applications and learn more about how ANT® technology can help them achieve their automation goals.